 This project aims to develop and integrate an adaptive motion planner for a quadruped robot that can adapt online to different and uncertain terrain conditions during operation. While current quadruped robots can perform effectively on structured terrains, they lack the capability to robustly adapt to irregular and dynamically changing environments. Such adaptability is critical for applications in domains such as defense, construction, and agriculture, where terrain conditions are often unpredictable.
This project aims to develop and integrate an adaptive motion planner for a quadruped robot that can adapt online to different and uncertain terrain conditions during operation. While current quadruped robots can perform effectively on structured terrains, they lack the capability to robustly adapt to irregular and dynamically changing environments. Such adaptability is critical for applications in domains such as defense, construction, and agriculture, where terrain conditions are often unpredictable.
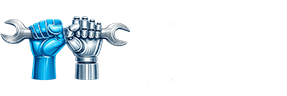
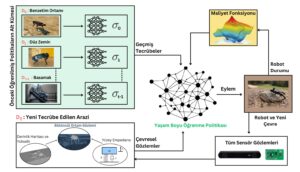
The proposed system enables the robot to leverage its previously acquired locomotion skills and adapt them online to new terrain conditions through a lifelong learning–based approach. The developed motion planner incorporates several innovative features, including memory-efficient learning using latent representations, learning from rich multimodal data through the fusion of vision and ground impedance sensing, and a hybrid integration of the learning algorithm with a stable locomotion controller, enabling faster and safer adaptation.
The system will be validated through extensive testing, first in simulation environments and subsequently in real-world indoor and outdoor scenarios. The project will conclude with four realistic field trials to demonstrate robustness and practical applicability. By significantly enhancing the terrain adaptability of quadruped robots, this project aims to advance intelligent robotic locomotion and deliver a high-value, deployable robotic solution.
* This project is supported by TÜBİTAK 1001 under grant number 124E704.