
3. Commercial Robotic Platforms
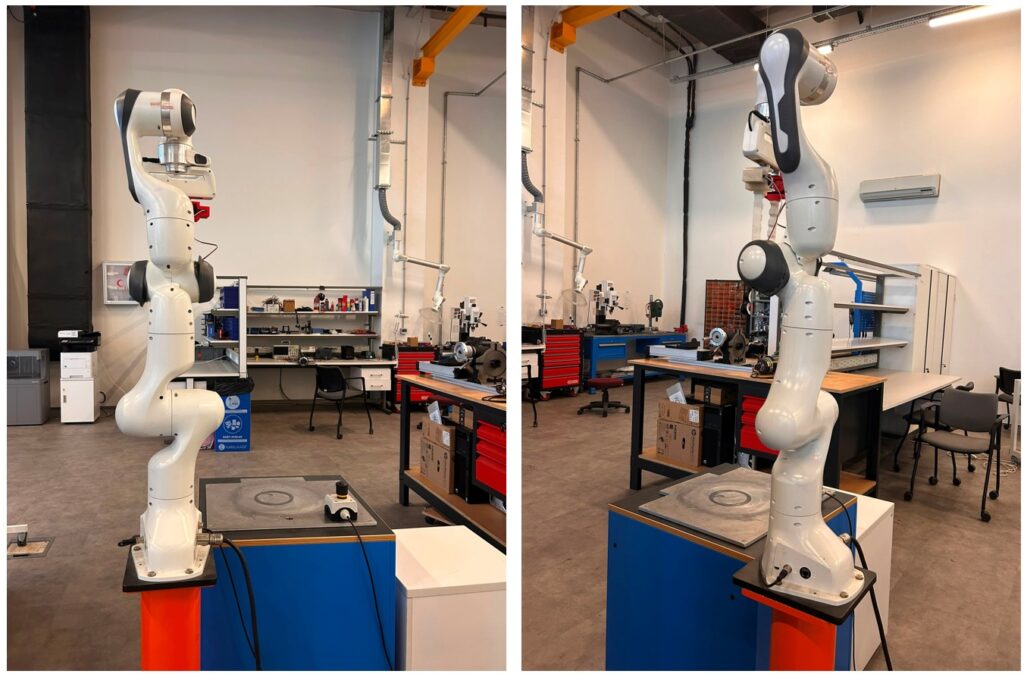
The laboratory is equipped with a Franka Emika Panda 7-degree-of-freedom robotic manipulator for research in robot manipulation, force control, and human–robot interaction. The platform provides direct torque control capabilities and is equipped with an adaptive gripper for dexterous manipulation tasks.
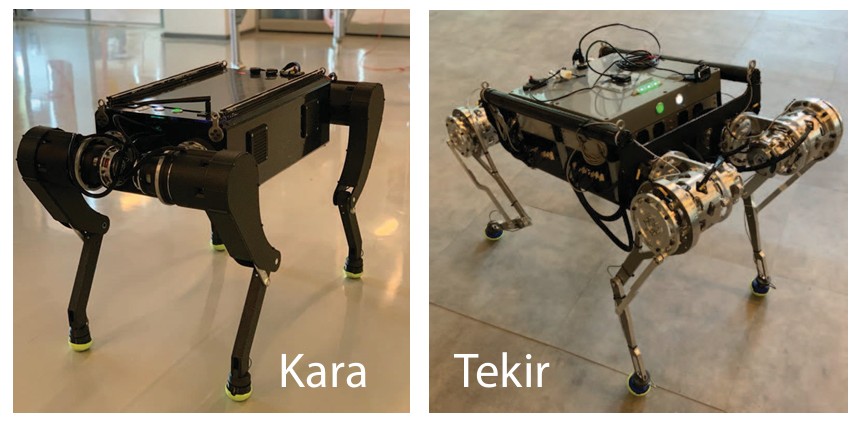
In addition, the laboratory operates a Unitree Go2 quadruped robot that supports research in autonomous locomotion, navigation, and reinforcement learning.